人工智能引领电力巡检科技创新,对存在高压、高危、复杂多变的工作场合,结合机器视觉、语音识别、激光测量等多传感技术手段,开发多自由度机械臂、巡检机器人、无人机等先进测控装置,并具有信息网络互联功能。
1.拥有自主巡航的精确引导停靠系统、停机坪、停机舱,为无人机在高楼或者杆塔上提供补能;
2.拥有机群统一实时管理平台,在补能站点的选址、巡检路径最优规划等方面开展研究工作;
3.自主巡航无限续能成为可能,在电力巡检以外的环境监测、农林遥测等其他发挥重要作用;

电力巡检平台:
1、四旋翼测试平台
采用小型低成本四旋翼进行机载协同计算平台的初始测试,待稳定后迁移至直升机平台。测试平台搭建分2阶段进行,第一阶段首先通过低成本硬件实现工作流闭环;第二阶段换装高性能终端计算硬件,开展复杂算法验证。
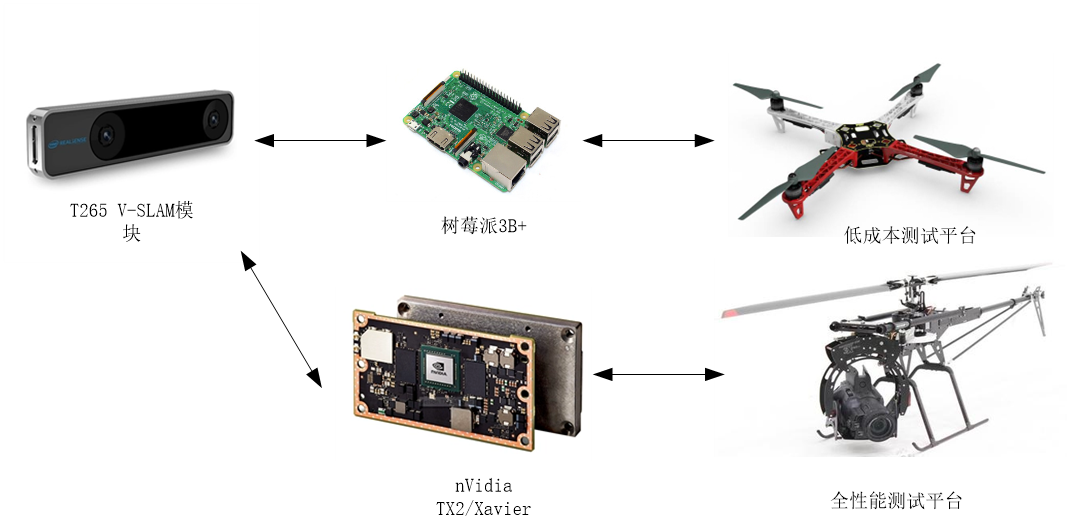
2、直升机测试平台
基于700mm级电动直升机搭建,通过结构改装增加飞控及GPS等航电系统,可实现GPS引导下的自动航线飞行;最大起飞重量12kg,通过结构改造后可作为测试平台,搭载小型油电混合动力系统开展相关研究。


3、共轴双旋翼无人飞行平台
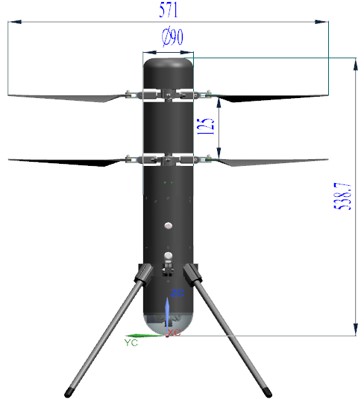
1.最大推重比≥2;


