近些年来,伴随着人工智能技术、计算机与传感器技术、电子信息工程技术等新型技术的快速发展,智能机器人技术也得到了突飞猛进的发展,并迎来了产业化的黄金阶段。通信技术水平的提高推动了物联网技术的广泛应用,再次为机器人技术应用领域的发展注入新活力。物联网技术与机器人技术的相互融合,在智能家居、安防等领域表现出前所未有的巨大前景,将会成为机器人技术发展进步的一个比较大的发展趋势。
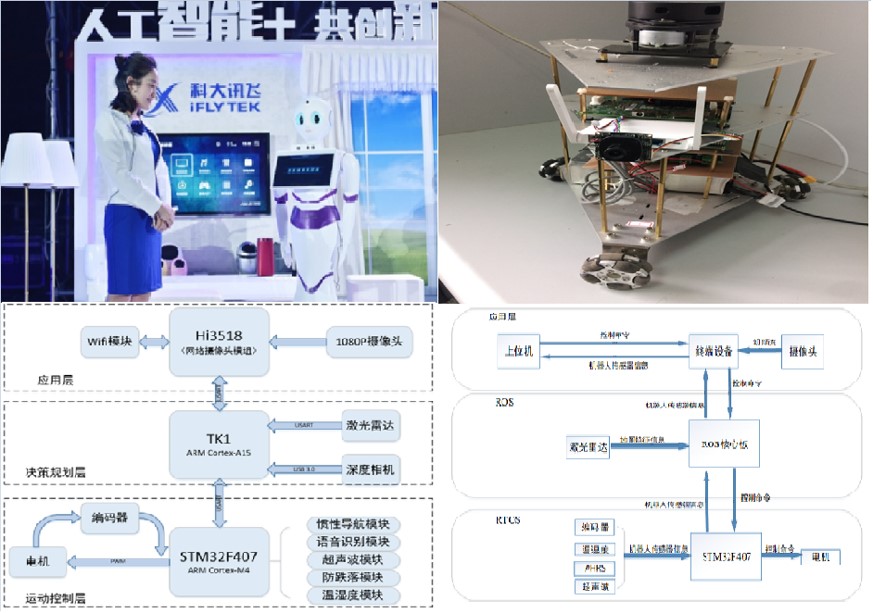
本实验室与科大讯飞联合研发的智能移动机器人解决了一些机器人定位与规划的关键问题,成功应用于讯飞的信息服务机器人。我们从机器人的物联网应用角度出发,设计了一套基于ROS机器人操作系统的移动机器人控制平台。所设计的平台融合了机器人技术与物联网技术,从而实现了两种关键技术的交叉融合与优势互补。机器人平台架构采用低耦合的分层控制理念,包括以物联网服务为核心的应用层、以机器人操作系统为核心的信息决策与处理层以及负责机器人运动控制的嵌入式底层,具有易于维护、低成本、可复用等优点。


