六足机器人又叫蜘蛛机器人,是多足机器人的一种。六足机器人第一代平台,定位为低成本的原理验证模型,基于自行搭配的外购成品零件,验证了基础性算法与功能应用,参与多项学生竞赛与展览活动,因平台限制已无继续开发价值,现用于学生相关应用能力培养。
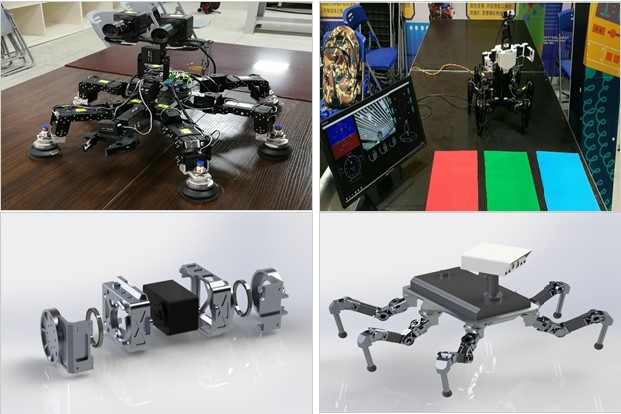
第二代六足机器人平台定位为有较好性能的实验平台,全研发流程培养更多团队成员,高性能伺服舵机更高运动性能,标准化机电接口更大有效载荷,模块化设计理念更好升级与变形潜力。
四足机器人
执行器:高功率和转矩密度,14位霍尔位置传感器,小减速比内转子无刷电机,1700W峰值功率。
传感器:足端接地传感器,IMU模组

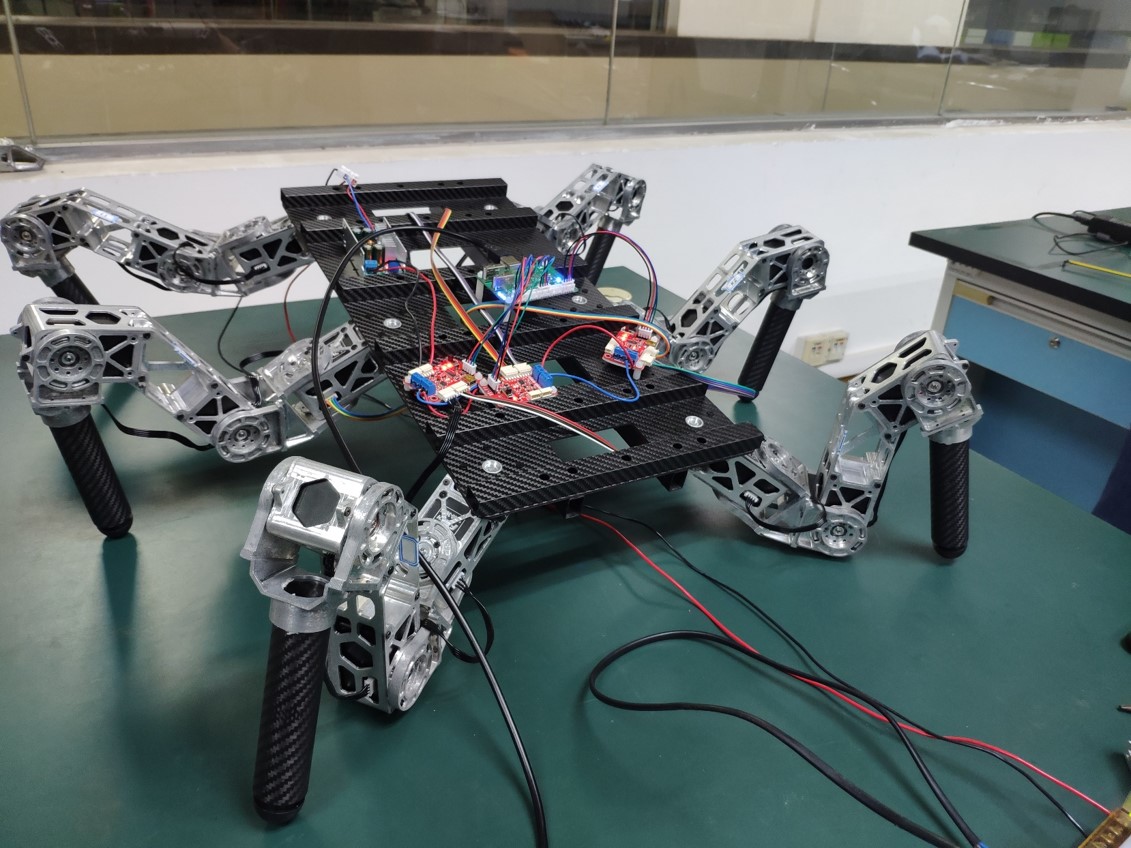
六足机器人
使用总线舵机驱动
轻量化设计
基础运动控制